DIY-MedTech Dronen fliegen - Team Dagobert
The pictures used in this wiki page belong to DroneOmega
Construction
The main mechanical components needed for construction are the propellers (either fixed-pitch or variable-pitch), the frame and the electric motors.
Rotor/Propeller
Drones have at least two rotors (bicopter), but the majority has four rotors (aka quadcopters). Except for bicopter, which behaves quite similarly to fixed-wing aircraft (or the famed V-22 Osprey), the multicopters require that not all rotors should rotate in the same direction

Propeller Pitch
The propeller pitch is a measurement of how far that a propeller will move through the air for every single rotation of the motor/propeller. This is only a theoretical approximation since real world factors such as prop material, air density, and efficiency can influence this distance. However, the pitch is a good measurement that will help you better understand your propeller performance.
The higher the pitch value, the faster your aircraft will move. In other words, with both motors/propellers spinning at the same RPM, the higher pitch propeller will travel further in the same amount of time. Changing the propeller pitch will also change the dynamic response of your drone.

Propeller Size
The size of the propeller is the distance from tip to tip. Longer propellers can generate more thrust at the same speed, but requires more torque from the motor to turn the prop. A larger propeller size does not mean that you will be able to fly faster.
The surface area of the propeller also determines how much thrust it can generate. The higher surface area allows more air to be moved, thereby generating more thrust. This also comes at the cost of more power draw from the motor.
The length of your quadcopter frame determines the maximum size of propeller that you can use. For a square drone frame as below, the maximum propeller size is X/2. For a rectangle frame, the maximum size is Y/2
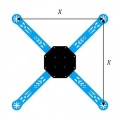
Square Frame
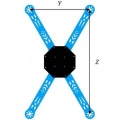
Rectangle Frame


Number of propeller blades
Two bladed propellers are more efficient at producing thrust as opposed to four or three bladed propellers so long as the propeller tips do not reach supersonic speeds. Adding blades increases the amount of thrust that is generated, but at the cost of efficiency.

Motor
To determine the drone motor size for the drone, there are two parameters that must be taken into consideration
- Total weight
- Frame size
Thrust to Weight Ratio
The thrust to weight ration (as known as TWR) is the main characteristic that will determine the drone flight profile. Understandably, to maintain steady flight or hover in the air, TWR should be 1. To take off, TWR needs to be greater than 1, however to maneuver, TWR needs to be at least 1.3 for an approx. maximum angle of attack α of 40 degrees.

Motor naming convention
Usually the size of a brushless motor is indicated by a 4-digit number of the patter XXYY (XX: stator width, YY: stator height in milimeters). A taller stator provides more power at higher RPM, while a wider stator provides more torque at lower RPM.
The kV motor specification is the number of revolutions per minute that the motor will turn when one volt is applied with no load on the motor. When you attach a propeller, you will get a reduction in the number of RPMs due to added inertia of the propeller, and air resistance. Higher kV motors will spin the propeller faster, but lower kV motors will generate higher torque. This is why larger propellers are paired with low kV motors, in order to provide the increased torque needed to turn the propellers. High kV motors are used for smaller, and lighter propellers.


Battery
LiPo (Lithium polymer) batteries offer significant advantages over other types of batteries (Nickel Metal Hydride and Nickel Cadmium):
- Higher capacities
- Higher discharge rates
- Lighter and can be made in different shapes and sizes.
However, they are not without drawbacks:
- Shorter lifespan (300-400 cycles)
- Highly flammable (if it gets punctured and vents into the air)
- Requires extra care when charging, discharging, and storing LiPo
Flight Controller
The brain of every drone is a flight controller (short FC). It's basically a microcontroller with dedicated sensors that detects orientation changes of the aircraft. It also receives user commands and controls the motors in order to keep the mulitcopter in the air.
Most common sensors that can be found on a drone are gyro (or gyroscopes), acc (accelerometer). They are usually packed together in an inertial measurement unit (IMU). Besides, barometer (barometric pressure sensors) and magnetometer can also be implemented to help the aircraft determine altitude and flying direction.
Nowadays, FC is rapidly evolving: more compact, using better processors and adding more peripherals, such as GPS, LED and distance sensors, etc.
Flying drone (in Switzerland)
In Switzerland, please watch the following video: Rules for flying drones in Switzerland (German)
To sum it up:

How to fly
Drone controls
A radio transmitter/receiver is required to fly a drone. Most of them will look like the following pictures:

With any of these controls, the harder you push the joystick, the faster the drone will accelerate in either direction. For beginners, it's recommended to push the sticks gently for slight movements.
There are four drone controls (similar to airplanes):

- Roll
- Pitch
- Yaw
- Throttle
Depends on the type of the transmitters, the location of each control type can be different. However, most consumer transmitter use the second type:

Due to the complex of drone movements, which relies heavily on local environment statuses such as wind, temperature, pressure, a drone has to be manually calibrated before flying. To do this, try to hover the drone 10-20 cm above the ground, and using the switches next to the joystick. This process is also called "trimming".
Pre-flight checklist
The laws regard to drone flying, is different from country to country. However, it's to be expected, that every airborne vehicle is an aircraft, no matter what size/weight. And therefore, everyone who control the aircraft is a pilot. By going through a pre-flight checklist will keep you and also your drone safe.
Weather & Site safety check
- Chance of precipitation (rain, snow) less than 10%
- cloud base at 500 feet (0.15 km)
- good visibility
- slow or no wind
- Set up take-off, landing and emergency hover area.
- Establish a safety perimeter if needed.
Visual System inspection
- Registration number is displayed properly (is not easily enforceable for drones)
- Check for abnormalities (frame, propellers, motors, undercarriage, additional devices: camera, payload, etc.)
- Attach propellers to motors, and energy sources
Powering up
- Turn transmitter on
- Turn aircraft on
- Verify the connection between transmitter and aircraft
- Verify antennas (upward to the sky)
- Calibrate sensors and compass
- Check battery levels on both transmitter and aircraft
Taking off
- Fly the drone to eye-level and keep hovering for 10-15 seconds
- Check imbalances (trimming if needed)
- Test control response (yaw, pitch and roll)
- Check the flight area again for safety
- Proceed with flight activities and have fun.